

一、核心思想
人工神经网络的基本理念是:
复杂的非线性函数可以通过简单计算单元(节点)的组合来学习得到。
就像人脑由大量神经元(neurons)组成,每个神经元接收输入信号、做简单运算、然后输出信号。ANN 模拟这种结构:
-
节点(nodes) ⇢ 神经元
-
有向边(edges) ⇢ 神经元之间的连接
-
边的权重(weights) ⇢ 连接强度
最简单的模型叫 感知机(Perceptron) 。
二、感知机(Perceptron)
感知机是一个线性分类器,类似逻辑回归(只是激活函数不同)。
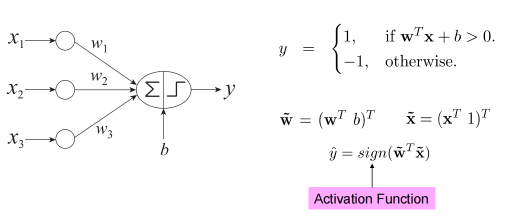
(1) 架构
每个输入特征 x_1,x_2,...,x_d 对应一个权重 w_1,w_2,...,w_d,还有一个偏置 w_0。
模型计算:
如果结果为正,则预测一类;为负,则预测另一类。
(2) 学习规则
不断调整权重,使预测输出 $\hat{y}$接近真实标签 $y$。
更新公式为:
其中:
-
\lambda:学习率(learning rate)
-
若预测正确,则不更新;若预测错,则调整权重方向。
每次遍历所有样本叫一个 epoch。
三、感知机的局限
感知机只能学习线性可分的边界。
比如:
这是著名的 XOR(异或)问题。任何一条直线都不能把正负样本完全分开。→ 感知机算法无法收敛。
机器学习入门 补1: 收敛1
四、多层神经网络(Multi-layer Neural Network)
为解决非线性问题,我们引入隐藏层(Hidden Layers) 。
每个隐藏层的节点接收上一层的输出,并将激活值传给下一层。整个结构叫 前馈神经网络(Feedforward Neural Network) 。
🧠 隐藏层的作用:
-
将输入空间非线性变换为新的特征空间;
-
逐层提取更抽象的特征;
-
具有足够的层数(深度)后,可以逼近任何复杂函数。
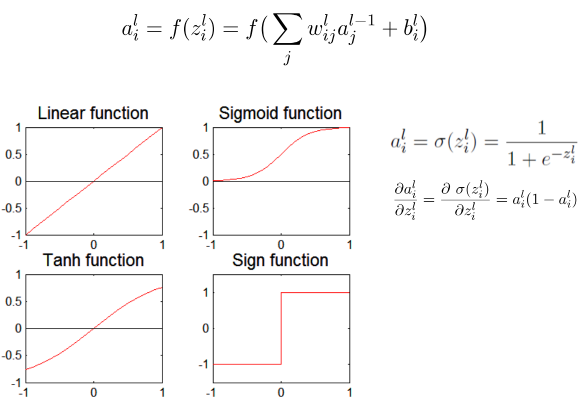
五、激活函数(Activation Function)
用于给模型增加非线性。
常见类型:
六、反向传播算法(Backpropagation, BP)
是多层网络的学习核心。
-
正向传播:计算预测值 \hat{y}
-
计算误差:用损失函数 L(y,\hat{y})
那么反向传播我们要让模型的预测值 $\hat{y}k$ 尽可能接近真实值 $yk$。
于是定义一个损失函数(Loss Function)来衡量误差,比如:
E(w,b)=\sum_{k=1}^1(yk−\hat{y}k)^2
也叫 均方误差 (Squared Loss) 。
“梯度下降”就是沿着损失函数下降最快的方向去更新参数。换句话说,让误差变小的方向走一点点。
更新规则:
其中:
-
\lambda:学习率(步子大小)
-
\frac{∂E}{∂w_{ij}}:梯度(权重对误差的敏感度)
SGD(随机梯度下降)
与其一次用全部数据,不如每次只用一小部分数据更新,速度更快:
-
SGD:一条样本更新一次;
-
Mini-batch SGD:一小批样本更新一次。
Computing Gradients(如何求梯度)
上面说的 \frac{∂E}{∂w_{ij}},怎么求?
1. 链式法则(Chain Rule)
每个神经元的输出是:
所以梯度分解为三部分:
2. 以 Sigmoid 激活函数为例
于是:
这里的 $δ_i^{(l)}$就是“误差信号”,表示第 i 个神经元对总误差的影响。
那每一层的 $δ_i^{(l)}$ 怎么算?
反向传播就是计算每层 δ 的方法。
1. 输出层(Output Layer)
对于最后一层(输出层):
(来自平方误差对输出的导数)
2. 隐藏层(Hidden Layer)
通过链式法则,误差往前“传”:
意思是:
-
每个隐藏层的误差是由它对下一层误差的贡献决定的;
-
所以要从输出层往输入层逐层计算;
3. 训练过程总结
-
前向传播(Forward Pass)
输入 → 隐藏层 → 输出层,计算预测值; -
计算损失(Compute Loss) ;
-
反向传播(Backward Pass)
从输出层往前计算每层的梯度; -
梯度下降更新参数;
-
重复多轮(Epoch)直到误差收敛。
总结成一句话:
前向传播算输出,反向传播算梯度,梯度下降去更新。
整个过程就像:
-
往前试一遍,看错多少;
-
往回传递误差信息;
-
调整每条连接的“力度”;
-
重复到模型学会为止。
七、网络设计与训练细节
1️⃣ 输入层节点数(Input layer)
-
每个数值型或二元变量对应一个节点;
-
每个类别变量(categorical)如果有 k 种取值,需要用 k 个节点(One-hot 编码)或 l$og_2k$ 个节点(编码方式)。
例子:
性别(男/女) → 1 个节点
颜色(红、绿、蓝) → 3 个节点(one-hot)
2️⃣ 输出层节点数(Output layer)
-
二分类问题(比如猫狗识别):1 个节点;
-
多分类问题(比如10种数字):k 或 $log_2k$个节点。
3️⃣ 隐藏层数量与节点数(Hidden layers)
-
层数越多,模型越复杂;
-
每层节点越多,模型的表达能力越强,但也更容易过拟合;
-
一般经验:从小网络开始,逐步加深。
4️⃣ 权重初始化与偏置(Initial weights & biases)
-
一般随机初始化(比如 Xavier、He 初始化);
-
不可全设为 0,否则所有节点学到相同东西。
5️⃣ 训练参数(Training parameters)
包括:
-
学习率(learning rate)
-
训练轮数(epochs)
-
mini-batch 大小(mini-batch size)
-
优化器(SGD, Adam, RMSProp 等)
这些参数决定了模型学习的速度和稳定性。
八、Characteristics of ANN(ANN 的特点)
✅ 优点
-
通用逼近器 (Universal Approximator)
多层神经网络理论上可以逼近任何连续函数。
(这就是“深度学习能学任何复杂模式”的理论基础。) -
自动学习特征
不用人工提取特征,模型会自己学哪些特征最有用。 -
能处理多余或无关特征
因为权重会自然减弱不重要的输入。
⚠️ 缺点
-
容易过拟合(Overfitting)
网络太大时,会把训练集“记住”,泛化能力下降。 -
梯度下降可能陷入局部最小值(Local Minimum)
因为误差函数不一定是凸的。 -
训练慢但预测快
训练时计算量大,但预测时只需前向传播。 -
对噪声敏感
噪声数据会导致误差传播,影响权重更新。 -
难以处理缺失值(Missing attributes)
神经网络要求输入完整。
九、对比
十、拓展
1️⃣ 关键基础:计算能力 & 数据
-
现代 GPU 让多层网络的训练成为可能;
-
大规模标注数据集(如 ImageNet)提供了足够的样本;
-
批量训练(mini-batch SGD)和自动微分库(PyTorch, TensorFlow)简化了训练。
2️⃣ 算法层面的改进
-
ReLU 激活函数:让深层网络训练更稳定;
-
正则化技巧:Dropout、L2、BatchNorm 等防止过拟合;
-
预训练 (Pre-training) :
-
有监督的(在大数据上先训练,再迁移);
-
无监督的(用自编码器 auto-encoder 学表示)。
-
3️⃣ 特化网络结构
4️⃣ 生成模型(Generative Models)
-
GAN(Generative Adversarial Networks)
通过“生成器 vs 判别器”的博弈生成真实感数据(图像、语音、艺术等)。